
개인적인 논문해석을 포함하고 있으며, 의역 및 오역이 남발할 수 있습니다. 올바르지 못한 내용에 대한 피드백을 환영합니다 :)
1. Introduction
- 최근 교통 표지판(traffic sign)에서 텍스트나 기호를 인식하는 task의 눈에 띄는 발전이 있었음
- 각각의 요소를 따로 인지하는 것은 교통 표지판을 이해하는 첫 단계에 불과
- 본 논문에서는 “traffic sign understanding”이라는 새로운 task를 소개
- 교통 표지판에 포함된 요소들을 인식하고
- 그 요소들 간의 관계를 파악하여
- “semantic description”(
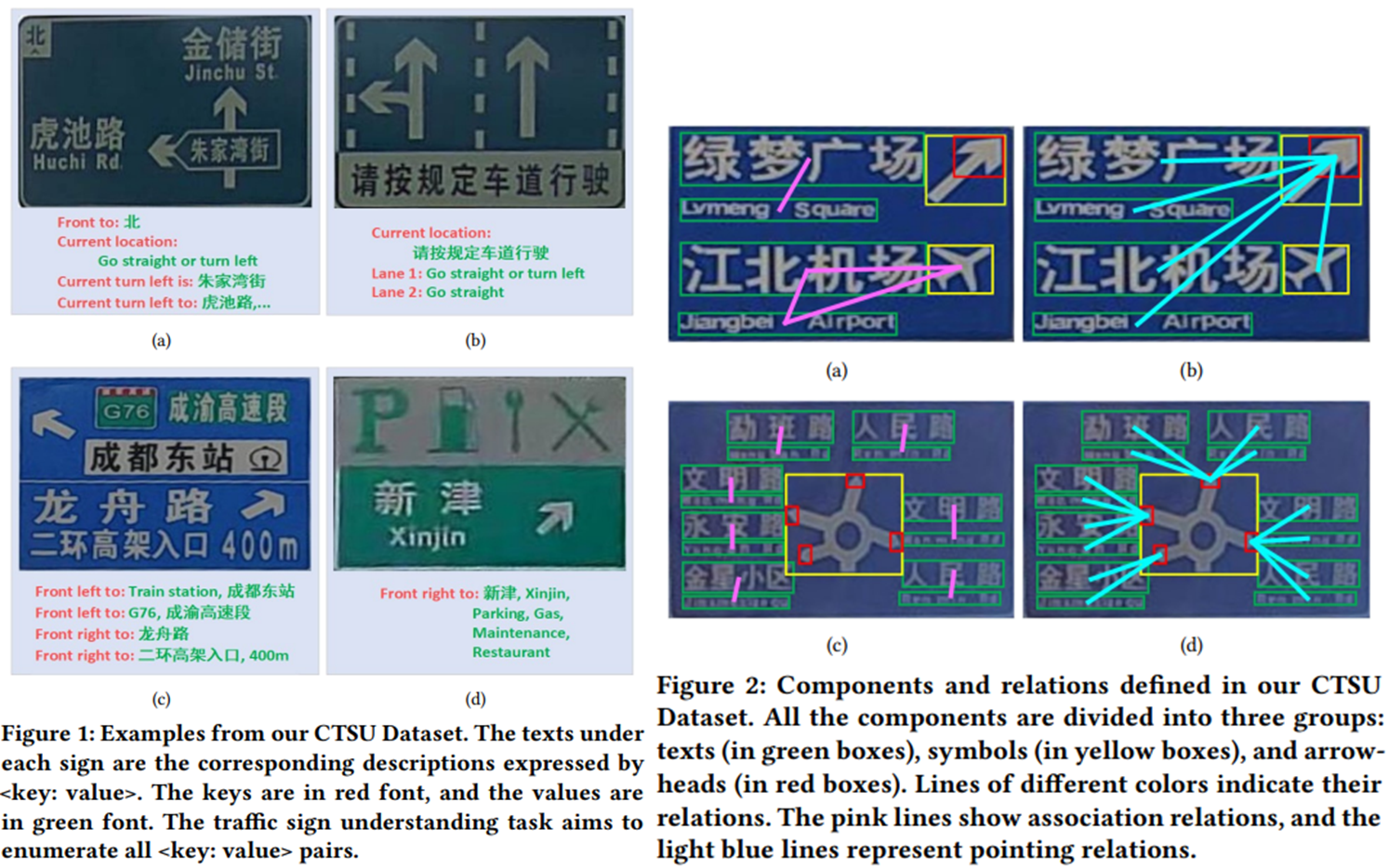
<key: value>의 형태)을 생성하는 것key: 표시 정보 (예: 현재 위치, 차선 번호, 전방 오른쪽 방향)value: 특정 내용 (예: 장소 이름, 도로 이름, 설명 단어)- 대부분의 교통 정보가 “indicative information + content”의 형태로 구성
- 자율주행, positioning assistance, map correction과 같은 애플리케이션에 활용될 수 있음
[@ Traffic sign understanding]
- Traffic sign understaning은 크게 세 가지 subtask로 구성
- 텍스트 및 기호의 위치와 semantic 정보를 추출하는 Component detection task
- 텍스트와 기호의 인식 결과를 어떻게 조합할 것인지, 구성요소들 간의 관계를 모델링할 수 있는 Relation reasoning task
- Graph Convolutional Network과 같은 관계 예측 모델을 사용
- 교통 표지판의 다양한 유형을 분류하는 Sign classification task
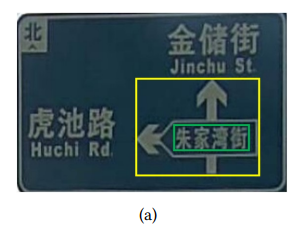
- 다양한 유형의 표지판에 따라같은 기호가 다른 의미를 나타낼 수 있음
- 예) 차선 정보 표지판(그림 1(b))에서의 윗방향 화살표는 “직진”을 의미하고 안내 정보 표지판(그림 1(a))에서는 “전면”을 의미한다.
- 교통 표지판의 유형을 예측함으로써 기호 간의 관계를 파악하는데에도 도움을 줄 수 있을 것
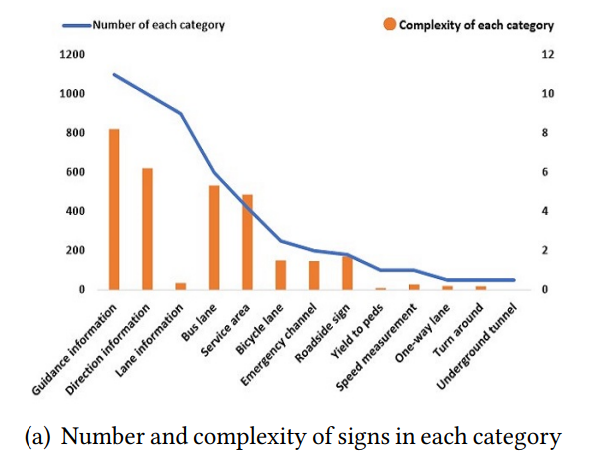
[@ CASIA-Tencent Chinese Traffic Sign Understanding Dataset (CTSU Dataset)]
- 복잡한 형태의 교통 표지판과 그 semantic description 레이블을 포함하는 첫 번째 데이터셋
- 실제 dashcam 영상에서 잘라낸 5000개의 교통 표지판 이미지를 포함
- 이미지 description, 기호, bounding box, 이미지 내의 텍스트, 기호의 카테고리
- 요소들 간의 관계에 대한 레이블도 지정
[@ Contributions]
- 교통 표지판 이미지 및 레이블 정보를 포함하는 데이터셋 CTSU 제안
- 다양한 유형의 교통 표지판을 이해하고 description을 생성하기 위한 새로운 unified 모델 제안
- 위 모델의 접근 방식이 traffic sign understanding에 효과적임을 실험을 통해 밝힘
2. Related Work
2.1. Traffic Sign Recognition
- 이전 교통 표지판에 관한 연구는 텍스트의 detection에 관한 연구가 주를 이룸
- Peng et al. proposed a two-stage cascade detection deep learning model, which used improved EAST for text line detection, and changed the size of feature maps to suit the text size of traffic signs.
- Hou et al. introduced an Attention Anchor Mechanism (AAM), which is used to weight the bounding boxes and anchor points to detect text in scene and traffic signs.
- Traffic sign에 대한 공개 datasets는 주로 원형이나 삼각형 형태의 몇몇 간단한 형태의 분류에 대해서만 존재했음
2.2. Scene Understanding
- 이미지를 기반으로 semantic description을 생성하는 task를 총칭하여 image caption이라 할 수 있음
- Recurrent Neural Network (RNN) 기반
- CNN만으로는 맥락 정보를 반영할 수 없음
- Rowan et al. first used LSTM to predict the object categories and then sent the object features and category information into LSTM for relationship prediction.
- Li et al. proposed a network that leveraged the feature of region, phrase, and object to generate scene graph and caption.
- 위 연구들은 RNN이나 LSTM을 사용해 맥락 정보를 반영했음
- 하지만, 공간적 정보(spatial information)을 반영하지 못함
- Graph Neural Network (GNN) 기반
- 더 나은 scene graph 구조를 생성하기 위해 GNN 기반의 모델들이 제안되었음
- Yang et al. proposed an attentional Graph Convolutional Network (aGCN) that uses contextual information to better reason about the relationship between objects
- 이러한 방법들은 이미지 내의 맥락 정보(contextual information)를 포함할 수 있지만, 위치정보나 의미적 정보(semantic information)을 반영할 수 없음
- Recurrent Neural Network (RNN) 기반
3. CTSU Dataset
– 중략 –
3.3. Evaluation Metric
- Image caption에서 이용되던 척도들은 자연어 처리에서 비롯된 척도
- 주로, 정답 값과 sequence matching의 형태이거나 유사도를 측정하는 형태
- 교통 표지판의 semantic description은 문법적인 규칙을 신경쓰지 않아도 되는 형태이므로 비효율적임
[@ Information Matching (IM)]
- 먼저 indicative information(
<key: value>에서key)에 대해 ground truth와 예측 값을 매칭- 각각 예측된 predicted description에 오직 하나의 ground truth description을 매칭할 수 있음
- 매칭 결과에 따라 각각 specific content(
<key: value>에서value)가 일치할 때 True Positive를 부여 - 위 결과에 따라 각 이미지당 하나씩의
recall,precision,F1-Measure를 계산
3.4. Statistics and Analysis
- CTSU Dataset contains 5,000 traffic signs
- 16,463
<key: value>descriptions - 31,536 relationship instances
- 43,722 components, including 18,280 texts
- 16,463
[@ Category Statistics]
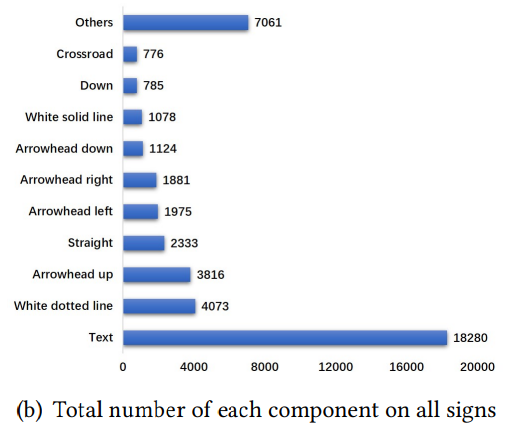
- 교통 표지판 클래스 별로 복잡도(Complexity)를 계산하고 이를 해석함
- 클래스 $i$에 대한 Complexity $C(c_i)$는 각 클래스 내 샘플들의 components 수($a_{c_i}$)와 각 샘플 내의 정보 엔트로피(information entropy; $H(c_i)$)의 곱으로 정의
- CTSU 데이터셋은 샘플 수가 많은 클래스에서는 복잡도가 높고, 샘플 수가 비교적 적은 클래스에서는 복잡도가 낮음
 sign 클래스 당 복잡도 분석 결과
sign 클래스 당 복잡도 분석 결과
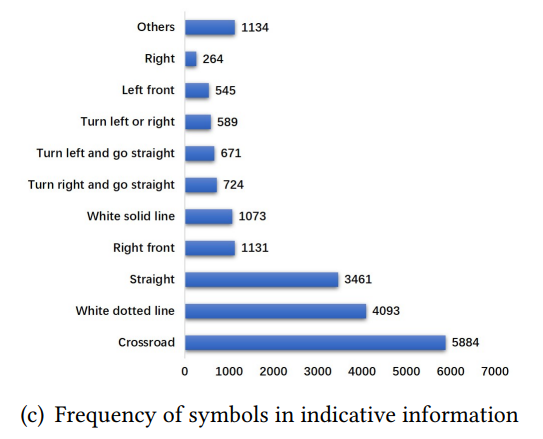
[@ Detection Imbalance]
- 교통 표지판 내의 구성요소들의 분포도 불균형
- ‘text’ 요소는 수가 많고 다른 요소들은 비교적 수가 적음
- 이를 잘 다룰 수 있어야 함
[@ Description Bias]
- indicative information(
<key: value>에서key)을 담당하는 ‘text’ 요소는 20%를 미치지 못함- ‘text’ 요소가 전체 요소의 40%를 차지함에도 불구하고
- 이 때문에 indicative information의 생성에 ‘text’의 “기여”가 과장될 것
- 과장된 ‘text’의 영향을 줄일 수 있도록 모델링해야 함
 indicative information을 담당하는 요소들의 분포, ‘text’ 요소는 제외함, 가장 많은 수를 차지하는 ‘Crossroad’의 수도 ‘text’ 요소에 비하면 수가 적은 편
indicative information을 담당하는 요소들의 분포, ‘text’ 요소는 제외함, 가장 많은 수를 차지하는 ‘Crossroad’의 수도 ‘text’ 요소에 비하면 수가 적은 편
4. Method
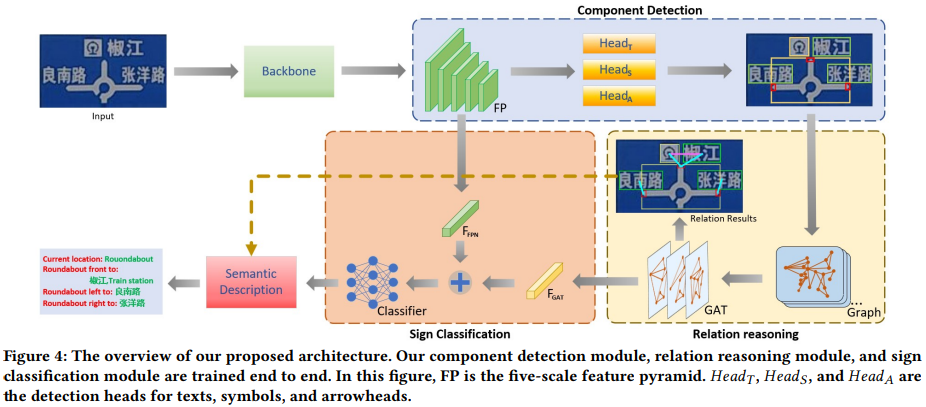 논문에서 제안하는 모델의 전체 프레임워크
논문에서 제안하는 모델의 전체 프레임워크
4.1. Component Detection
- 교통 표지판의 요소들을 object detector를 통해 탐지해내는 과정
- single-stage anchor-freed object detection model인 FCOS를 사용
- 물체의 중앙을 기준으로 bounding box를 예측하는 FCOS 알고리즘 특성상 두 물체가 겹쳐서 존재하면 잘 탐지하지 못하는 특성이 있음
- 논문에서는 ‘texts’, ‘symbols’, ‘arrowheads’를 각각 따로따로 탐지하는 detection head를 두어 이를 해결했음
 두 요소가 겹쳐서 존재하는 경우
두 요소가 겹쳐서 존재하는 경우
4.2. Relation Reasoning
- 그래프 구조
- 구성요소(‘texts’, ‘symbols’, ‘arrowheads’)를 그래프의 node
- 이 요소들의 관계를 그래프의 edge
- 관계를 일부 node들에 대해서만 정의할 수 없음
- 두 요소간 물리적 거리가 가깝다고 해서 꼭 관계를 형성하지는 않음
- 따라서, 모든 node들이 연결된 그래프 구조로 초기화
 관계를 형성하고 있음에도 요소간 거리가 멀리 떨어진 경우가 많음: 때문에 논문에서는 fully connected graph 구조를 사용
관계를 형성하고 있음에도 요소간 거리가 멀리 떨어진 경우가 많음: 때문에 논문에서는 fully connected graph 구조를 사용
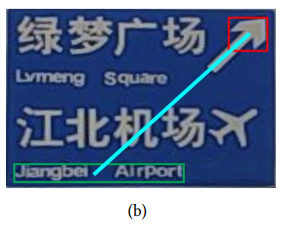
[@ Feature generation]
- node feature 및 edge feature를 생성하는 방법
- RoI feature: object detector가 만든 bounding box에 RoIAlign을 적용
- Position Mask: object detector가 만든 bounding box 위치에 masking한 이미지를 fully connected layer에 연결하여 feature 생성
- Semantic Encoding: object detector가 예측한 클래스 정보를 fully connected layer에 연결하여 feature 생성 (클래스 정보로는 edge를 표현할 수 없기 떄문에 edge에 대한 Semantic Encoding은 없다)
- annotations
- node feature: $F_N = V_{ds} + V_{ps} + V_{ss}=\text{RoI feature} + \text{Position feature} + \text{Semantic feature} \in R^D$
- edge feature: $F_E = V_{du} + V_{pu}=\text{RoI feature} + \text{Position feature} \in R^D$
- $D$는 각 feature 차원 수
- 각 feature가 업데이트 되는 것을 $\prime$을 붙임으로써 표현
[@ Graph Attention Network (GAT)]
- GAT는 Graph Network에 Attention 메커니즘을 추가하여 node간 edge에 중요도를 부여하여 Graph 구조 정보를 모델링
- Attention coefficient
- node $N_i$에 연관된 모든 node 및 edge에 대해 영향력이 있는 정도(중요도)를 계산
- edge $E_{ji}$는 node $N_j$에서 node $N_i$로의 관계를 의미
- $f_A: R^{2D} \to R^D$: fully connected layer
- $\parallel$: concatenation operation
- node feature의 업데이트
- edge feature에 Attention coefficient를 element-wise 곱을 하고 node feature를 concat하여 fully connected layer에 태움
- $\otimes$: element-wise/hadamard product
- $\sigma$: activation function, 논문에서는
leaky ReLU사용 - $f_N: R^{2D} \to R^D$: fully connectec layer
- edge feature의 업데이트
- 두 노드 $N_i$와 $N_j$에 Attention coefficient를 element-wise 곱을 하고 더한 후 edge feature를 concat하여 fully connected layer에 태움
- $f_E: R^{2D} \to R^D$: fullly connected layer
- 학습 과정에서는 ground truth bounding box를 통해 학습하여 GAT가 더 잘 수렴할 수 있게하였음
4.3. Sign Classification
- 교통 표지판의 관계를 파악하는데 교통 표지판의 유형을 분류하는 것이 도움이 될 수 있음
- backbone feature map 중 가장 작은 feature($FP_s$)와 GAT를 거친 node feature($F_{N}$)들을 더하여 교통 표지판 유형 예측에 사용
[@ Loss Function]
- section 4.1, 4.2, 4.3의 요소들의 loss를 선형 결합함
4.4. Semantic Description
- Inference objects
- detected box를 필터링하는 threshold = $0.2$
- relationship을 필터링하는 relationship threshold = $0.5$
- text box에 대해서는 사전학습된 OCR모델로 텍스트를 추출함
- heuristic method to generate semantic descriptions
- relation 예측 결과를 통해 relation trees를 구성
- symbol에 따라 의미 태그 부여
- 교통 표지판 유형에 따라 symbol에 의미를 부여
<key: value>structure 구성- 대부분
value의 위치에 명확한 요소들이 위치함 (예. 지명, 지하철역명 등등) - 교통 표지판 유형에 따라
key의 위치에 명확한 요소들이 위치하는 경우도 있음 (예. lane information sign에서는 차선 번호(lane 1, lane 2, …)가key에 위치함) - 따라서, 해당 작업도 교통 표지판 유형에 따라 부여
- 대부분
5. Experiments
- CTSU 데이터셋에 대해 실험 수행
학습과 검증 데이터셋에 대한 설명이 없는 것으로 봐서 아래 실험 결과는 모두 학습 데이터에 대한 실험 결과인 것으로 보인다.
5.1. Implementation Details
- backbone: ImageNet에 사전학습한 ResNet-50, Deformable Convolutional Network (DCN) 테크닉 사용
- GAT의 레이어 수는 5개
- 50 epochs
- learning rate 0.01
- epoch 35, 45에 각각 0.1씩 감소
- batch size 8 on 2 GPUs
5.2. Ablation Studies
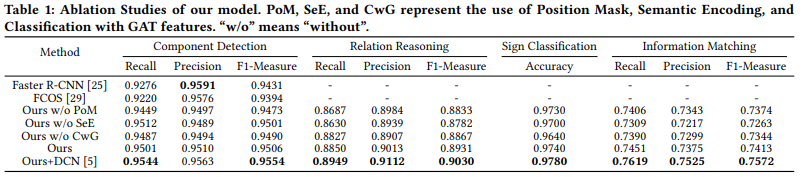
[@ Multi-head Detection]
- FCOS 특성 상 겹쳐있는 물체를 포착하지 못하는 문제를 밝힘
- 약 1%정도의 성능 향상
- Faster R-CNN도 겹쳐있는 물체에 대한 해결책이 될 수 있음
- 사전 정의된 anchor 세팅이 성능에 제한이 되었음
- 약 0.7% 정도의 성능 차이
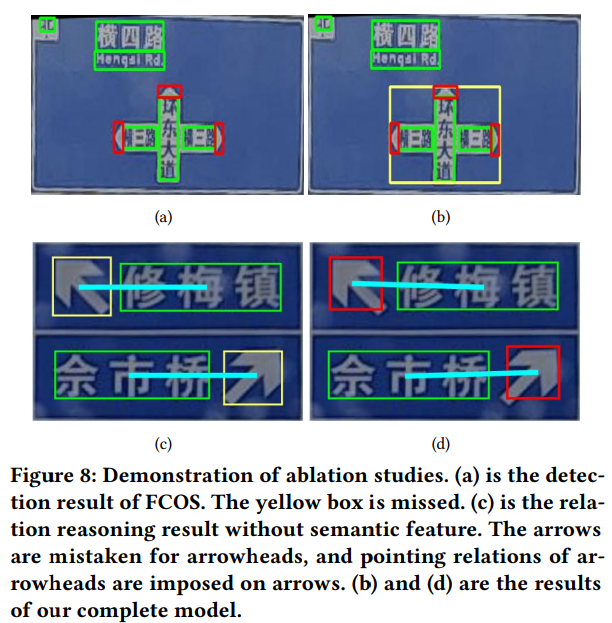 기존 FCOS(a)와 논문에서 제안하는 Multi-head detection 모델(b)과의 차이
기존 FCOS(a)와 논문에서 제안하는 Multi-head detection 모델(b)과의 차이
[@ Semantic Encoding]
semantic feature를 제외했을 때, arrowhead가 아닌 symbol에 relation이 할당됨(c)
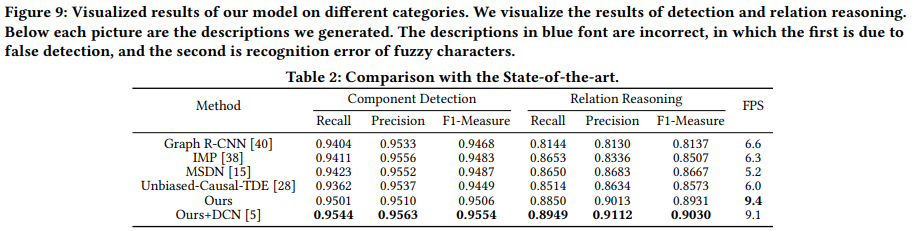
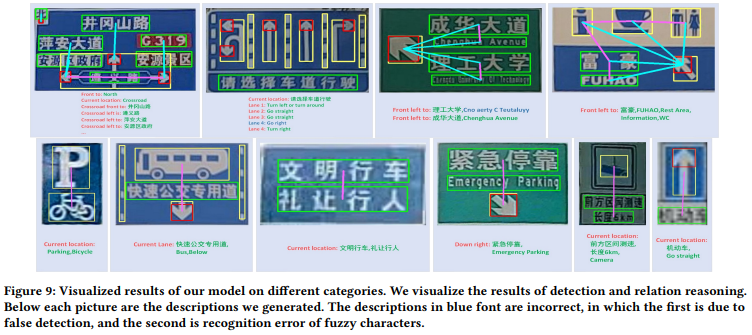
5.3. Comparison with the state-of-the-art
6. Conclusion
- intelligent transportation을 위한 traffic sign understanding이라는 task를 새롭게 제안
- bounding boxes, relations, semantic description 레이블을 할당한 CTSU Dataset 제안
- Component detection, relation reasoning, sign classification, semantic description generation의 multi-task 학습 프레임워크를 제안
Comments powered by Disqus.